|
Introduction : Voila, aprŤs Ítre passť au moyen format argentique j'ai enfin fait l'acquisition d'un appareil photo numťrique communťment appelť APN. Mon choix c'est donc portť sur un bridge, le kodak easyshare Z1012IS pour plusieurs raisons. La premiŤre raison ťtait que kodak fabriquait les capteurs CCD embarquť dans les dos numťriques des Hasseblad mais ťgalement dans les camťras numťriques de l'IGN. Un autre point fort ťtait son zoom x12 avec une ouverture correcte qui rendait la lentille frontale trŤs impressionnante, je m'ťtais dis que la qualitť de l'optique Schneider au zoom minimal aurait rendu une image parfaite. Donc pour ~200 Ä j'ai fait l'acquisition de cet APN en dťcembre 2008. En outre mon stage de fin d'ťtudes de 20 semaine je l'ai rťalisť ŗ l'IGN, au laboratoire mÍme du LOEMI (lien ci-dessus) oý j'ai ťtudiť la nettetť des images numťrique (mťmoire disponible). Aujourd'hui, plus d'un an aprŤs je reviens sur cet APN pour faire le point de maniŤre objectif. Protocole : Afin de rester dans la logique d'achat de l'APN, le zoom pour les images servant de test sera le plus possible proche de 1. Dans le but d'avoir le plus d'information possible sur cet appareil j'ai procťdť ŗ une calibration de l'objectif avec le polygone d'ťtalonnage de l'ESGT en janvier 2009. Le principe est simple on prend une sťrie de photos des points connus en Y, X et Z puis on compare les coordonnťes clichť (x, y) ŗ chaque point visible sur l'image.
Voici ŗ quoi cela ressemble (cliquez sur l'image pour l'agrandir) f/4 1/800s f=5,8mm d'aprŤs les EXIF...
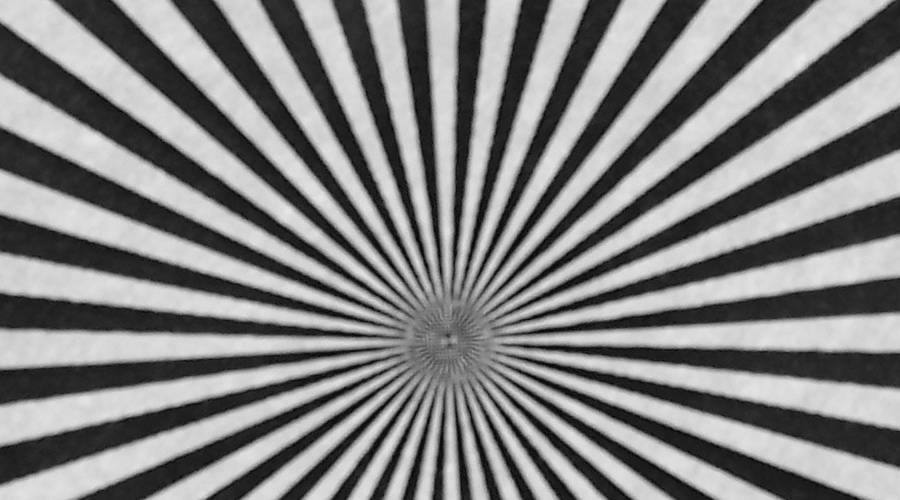
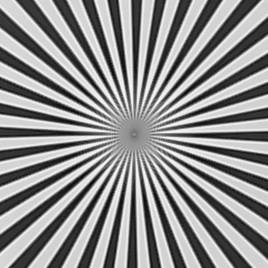
Premiers rťsultats Sans m'ťtendre sur le sujet que peu de monde intťresserait la calibration des paramŤtres interne permet de connaÓtre avec plus ou moins de prťcision la focale, le projetť du centre optique sur le CCD et la distorsion. Ces rťsultats peuvent Ítre obtenus qu'avec une seule image cependant j'ai prťfťrer en prendre 21 pour plus de rigueur soit 832 points saisis. Donc sans attendre voici les rťsultats : Le point principal d'autocollimation soit le projetť du centre optique sur le capteur CCD ŗ pour coordonnťes X=1857.654 Y=1327.032 (coordonnťes sur le CCD -> l'image) Z=3572.372 (focale). Il va sans dire que les unitťs sont en pixel, et lŗ la premiŤre tentation est de connaÓtre la taille du pixel car on connaÓt (EXIF) la longueur de la focale = 5,8mm d'oý un pixel de 1,624 Ķm. Je reviendrai sur la taille du pixel plus loin. FTM Dans le cadre de mon stage j'ai effectuť des mesures de fonction de transfert de modulation, plus simplement des mesures de contraste en fonction de la frťquence spatiale avec l'image d'une ťtoile de Siemens dont voici un exemple :
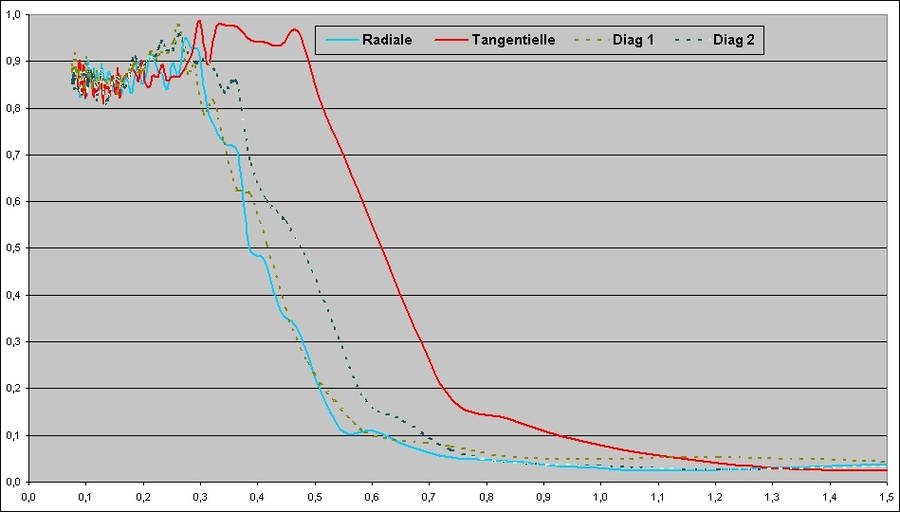
FTM Pour simplifier les FTM sont obtenues par mesure de contraste du bord vers le centre de l'ťtoile dans deux directions principales, tangentielle et radiale. En ordonnťe on trouve le contraste, en abscisse les frťquences spatiales normalisťes suivant la frťquence de Nyquist, c'est ŗ dire qu'a la valeur de 1 cela ťquivaut ŗ un signal de pťriode de 2 pixel : 1 blanc, 1 noir ŗ 0,5 : 2 blancs, deux noirs etc. Ainsi on voit parfaitement le niveau de la rťsolution de l'objectif. De plus on trouve dans certains ouvrage que la valeur de la FTM au-delŗ de Nyquist est due au bruit dans l'image.
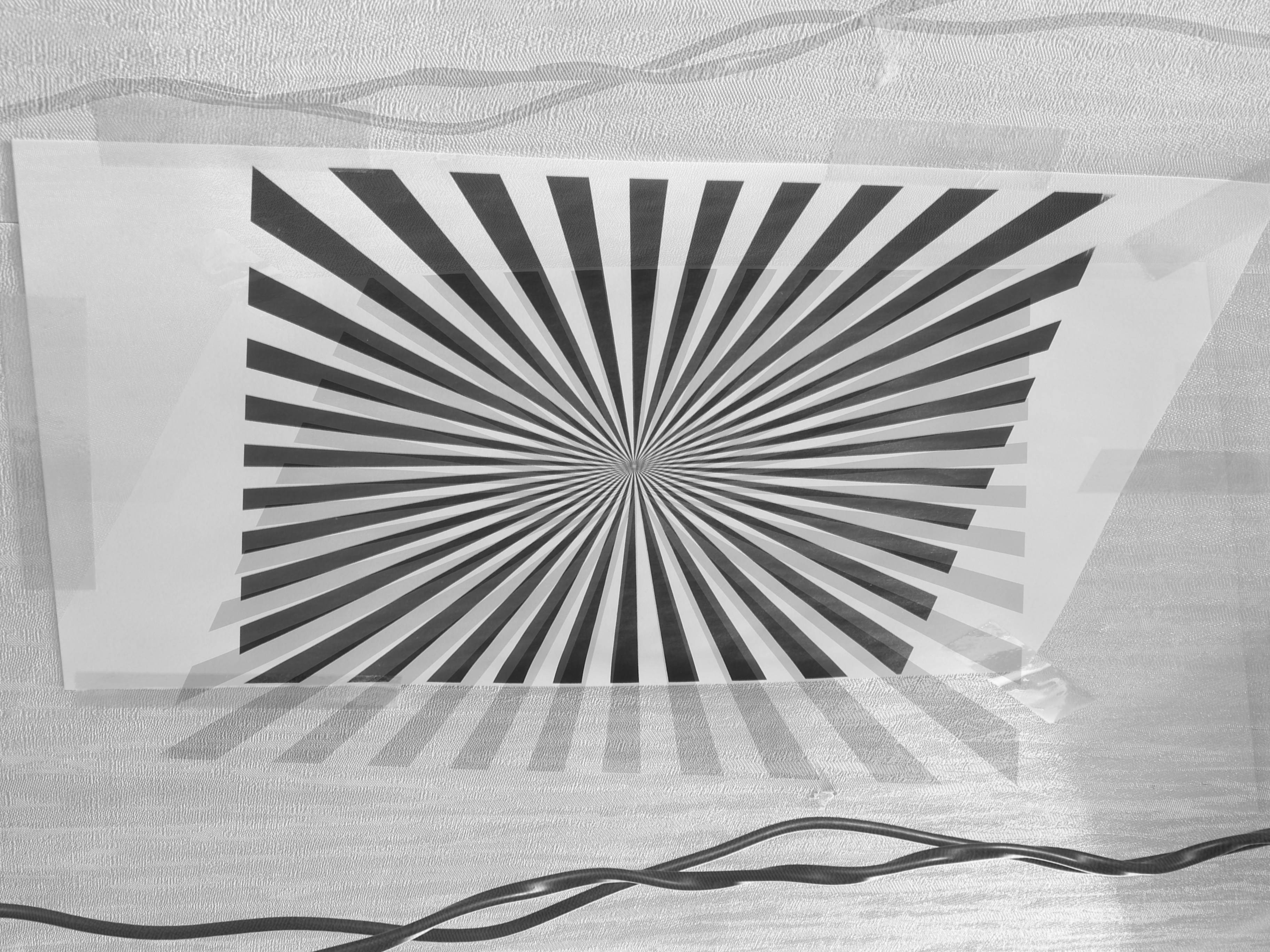
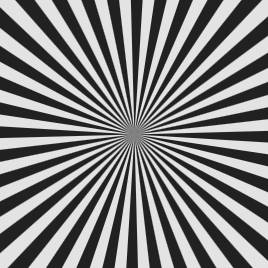
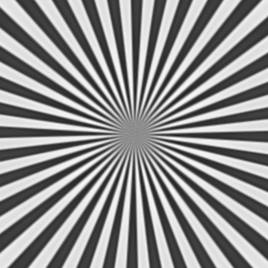
Il n'y a pas besoin d'explication pour savoir qu'il y a une grande disparitť entre les deux directions, de plus le contraste est trŤs vite limitť. PSF Lŗ il s'agit d'un chapitre qui nťcessite quelques connaissances dans le domaine du traitement des images numťriques. ņ partir d'une image d'une mire en ťtoile de Siemens on reconstitue la matrice de convolution qui va convoluer l'ťtoile thťoriquement nette en une image, image proche de celle acquise. Ainsi il est possible de dťterminer l'ťtalement de la tache focale et la dispersion d'un signal ponctuel situť ŗ l'infini. Le problŤme de cette mťthode rťside dans le calcul matriciel, trŤs coŻteux en terme de calcul. En moyenne 5 minutes sont nťcessaires pour la rťsolution d'une seule ťtoile. Pour ces exemples complets il faut prŤs d'une journťe entiŤre de calcul pour un Pentium IV @ 3GHz. Voici donc ŗ quoi ressemble des PSF (Point spread function = Fonction d'ťtalement de point) d'un kodak Z1012IS, d'abord l'image originale comportant les 9 ťtoiles de Siemens ŗ 36 pťriodes.
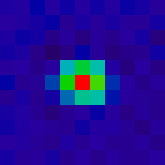
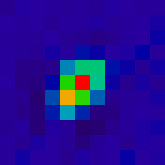
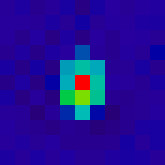
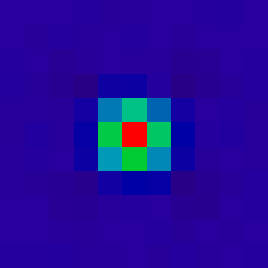
Maintenant les PSF (ŗ l'ťchelle du pixel, rouge=100% bleu=0% Noir=-50%).
Lŗ on remarque bien que la dispersion soit importante et mÍme loin du centre il reste des rťsidus liťs aux bruits dans l'image originale. De plus autour du noyau de la matrice il y a une couronne de valeurs nťgatives, selon moi et confirmť par des spťcialistes des artefacts d'une dťbayerisation violente. MÍme si la PSF est intťressante sa principale fonction est de pouvoir dťconvoluer l'image acquise, dans un sens, la rendre plus nette. Dans ce but j'ai dťconvoluť quelques images mais le bruit ťtait tellement amplifiť que cela rendait la manipulation dangereuse. La taille du pixel Pourquoi connaÓtre la taille du pixel ? …lťmentaire cher lecteur... plus un pixel est gros plus il reÁoit de la lumiŤre, plus il en reÁoit plus il a d'ťlectron et plus il y a de jus moins l'erreur due au convertisseur analogique / numťrique est grande en proportion. C'est ce qu'on appel couramment le signal sur bruit. La taille d'un pixel d'un vrai capteur kodak est de l'ordre de 6 ŗ 10 Ķm de cotť, 1 ŗ 3 Ķm de cotť pour un compact ou un bridge et pratiquement de la taille de la longueur d'onde pour un tťlťphone portable. Dans la documentation la taille du CCD en diagonale est de 1/2.3" soit 0,4348 pouces et donc 11,04 mm. Comme la matrice a une proportion de 4/3 on en dťduit tout de suite les dimensions du CCD (pas le composant, que la surface sensible je prťcise...). Pythagore nous aide et donne 8,835 en largeur et 6,625 en hauteur et la dimension d'une image est de 3648 par 2736 (format paysage). La largeur d'une colonne est de 2,42 Ķm et la hauteur d'une ligne est aussi de 2,42 Ķm. Attention c'est le pitch il faut savoir qu'il y a des drains espaces vides entre chaque pixels (ťvite que les ťlectrons se baladent de faÁon anarchique sur le CCD). Je rappel ici que l'on avait trouvť 1,624 Ķm avec les informations de la focale dans les EXIF. Cet ťcart permet d'affirmer qu'il y a une donnťe d'erronť dans le problŤme, soit la distance focale (le plus probable) soit la taille du CCD, cependant je n'ai jamais eu la data sheet du CCD et comme je ne veux pas dťmonter l'un de mes 2 Z1012 (Couplť en montage stťrťoscopique) la question reste ouverte. Stratťgie de rťduction du bruit Comme nous venons de le voir le bruit prťsent dans les images est assez gÍnant ŗ notre niveau ! Pour une utilisation de salon ou de jardin, pas de problŤmes mais personnellement c'est dťprimant. Il est vrai qu'avec le rťglage des ISO de 64 ŗ 3200 on gŤre le bruit mais mÍme ŗ 64 ISO et une prise de vue de 2 secondes le bruit reste nťanmoins bien prťsent. Premier essai Comme avec PaintShopPro 5 on ne peut faire la moyenne que de deux images le choix de programmer en C++ se fit vite sentir, il est vrai qu'un programme similaire doit bien exister mais le temps de chercher, on l'aura dťjŗ fait. Un peu de programmation fait de mal ŗ personne...
Cet exemple dťmontre parfaitement bien que le programme calcul bien comme je le souhaite, le rťsultat est vraiment parfait. C'est ŗ dire que le bruit moyen est rťduit voir nul, de ce que l'on peu voir ŗ líúil. Second essai Lŗ j'ai photographiť 16 fois une ťtoile de Siemens et j'ai directement converti les photos en niveau de gris pour effectuer la moyenne. Il en ressort que la moyenne est pratiquement sans bruit, les zones sombres sont bien uniformes comme dans la rťalitť. A ce niveau de bruit on remarque bien qu'il y a un phťnomŤne de sursaut au bord des zones sombres, certainement dŻ aux filtres de dťbayerisation. Ci-aprŤs il y a un assemblage des 16 miniatures composant l'image finale.
Pour la derniŤre image j'ai voulu faire un trucage vieux comme la photo, la traditionnelle photo d'un spectre (fantŰme) mais le poids est faible 1/16! ce qui a pour effet qu'on ne le remarque presque pas sur l'image finale.
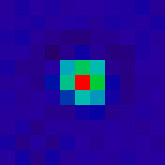
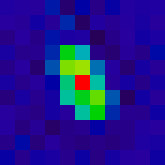
Maintenant que l'image est faite Le programme de calcul de PSF peu calculer. Les images ci-dessous de gauche ŗ droite reprťsente : la partie de l'image qui ŗ servi au calcul, l'image thťorique gťnťrť par le programme, L'image thťorique convoluťe avec la PSF et enfin la PSF
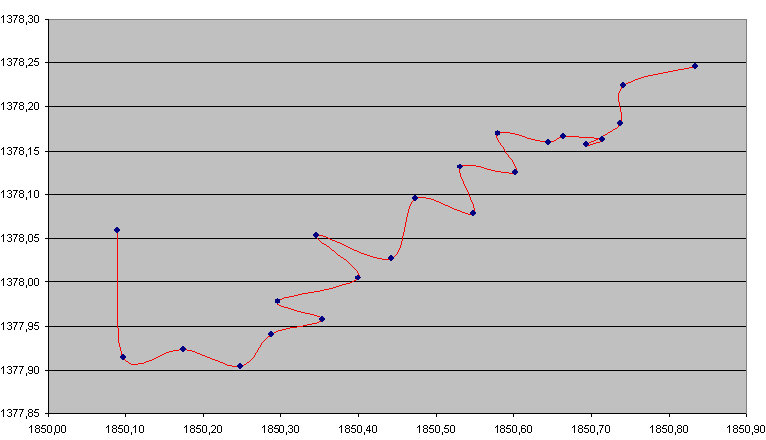
Sur ce calcul on remarque parfaitement bien que la PSF est nette et qu"il y a peu de bruit qui vient nuire ŗ la lecture de cette PSF, voir plus haut pour comparer. TroisiŤme essai Maintenant que l'on ŗ vue l'ťtendu des rťsultats il est tout naturel de se poser les bonnes questions. ņ ce stade la question qui me taraudait l'esprit, question que vous devez vous poser, l'image N+1 capture t-elle la mÍme scŤne que l'image N. Pour rťpondre ŗ cette question j'ai fait un zoom lťger sur l'ťtoile de Siemens et j'ai pris une sťrie de 22 images avec le retardateur. Ainsi lors de chaque prise de vue je me trouvais loin de l'appareil ce qui rťduisait les mouvements du sol. Cependant comme il n'y a pas de tťlťcommande pour cet appareil la pression du bouton devient donc obligatoire, ce qui entraÓne une pression sur l'appareil. Dans une moindre proportion la question suivante ťtait-elle aussi intťressante ŗ traiter. Comme le programme de moyenne ne fonctionne qu'avec un seul canal, essayons de sťparer chaque canal Rouge, Vert et bleu et de reconstruire une image couleur sans bruit. Dans le sous programme qui calcule les PSF il y a la dťtection des centres avec une prťcision de 1/50 pixel, donc je m'en suis servi pour voir comment cela ťvoluait au cours de la sťrie de prise de vue. L'image ci-dessous rťsume ŗ peu prŤs tout.
Dans le but de choisir 16 points corrects j'ai donc fait la moyenne et exclu les 6 points qui avaient leurs vecteurs d'erreur les plus importants. Comme on vient de le voir avec la rťsolution optique (Chapitre sur la PSF) les dťplacements du centre sont bien infťrieurs au 5eme de la rťsolution optique donc faire la moyenne n'est pas un acte de dťgradation de l'image ! Maintenant que l'on s'est autorisť ŗ faire la moyenne il faut le faire et si possible en couleur. Comme le programme de moyenne a ťtť fait pour des calculs de PSF donc en PGM en 256 couleurs j'ai du extraire chaque canal des 16 images en faire la moyenne !
Maintenant ŗ gauche l'une des 22 images originales et ŗ droite l'image composite
Cette illustration reprťsente les ťcarts entre les deux images situťes ci-dessus, les ťcarts ťtant infťrieurs ŗ 16 une ťgalisation de l'histogramme ŗ ťtť effectuťe.
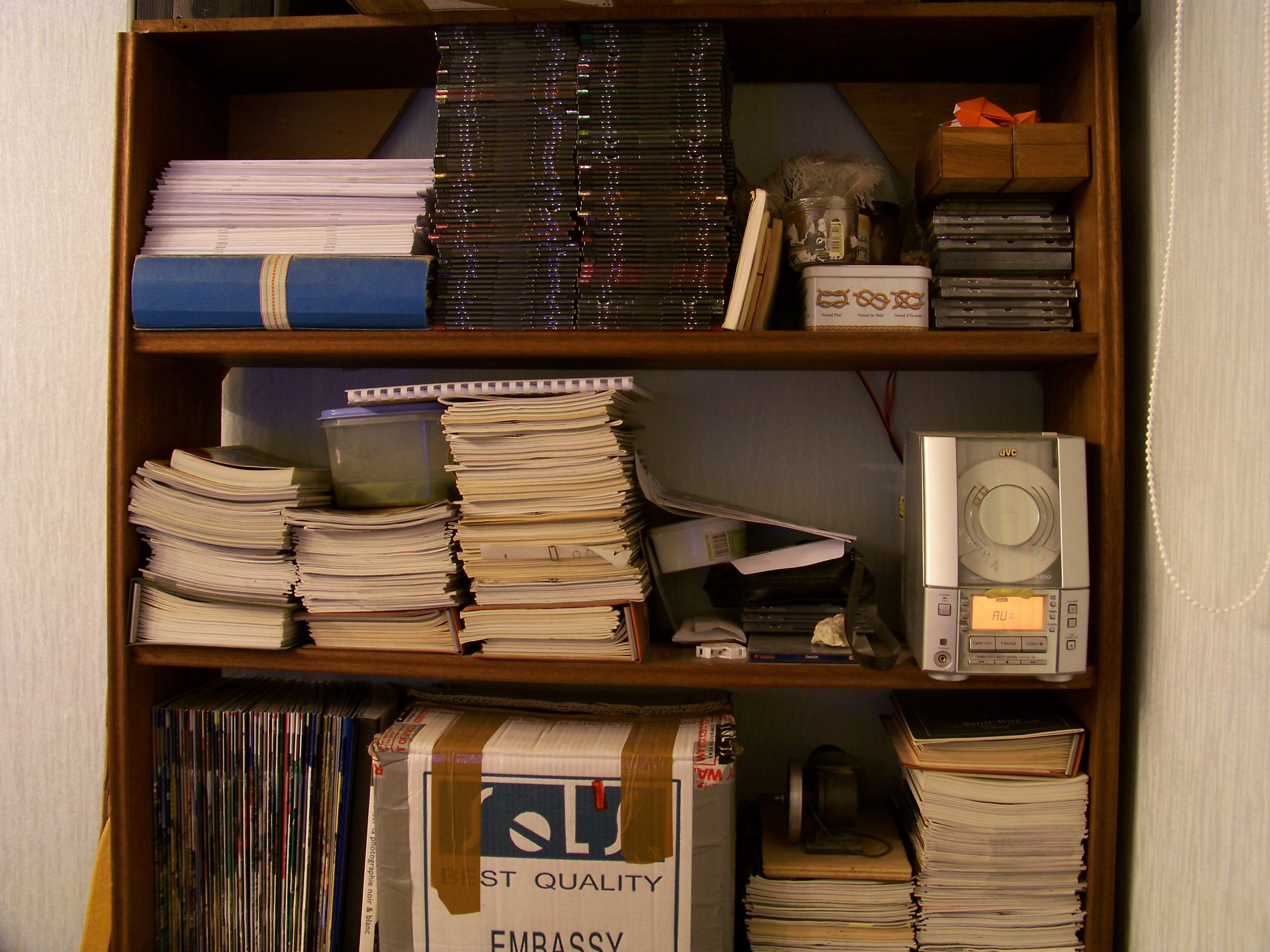
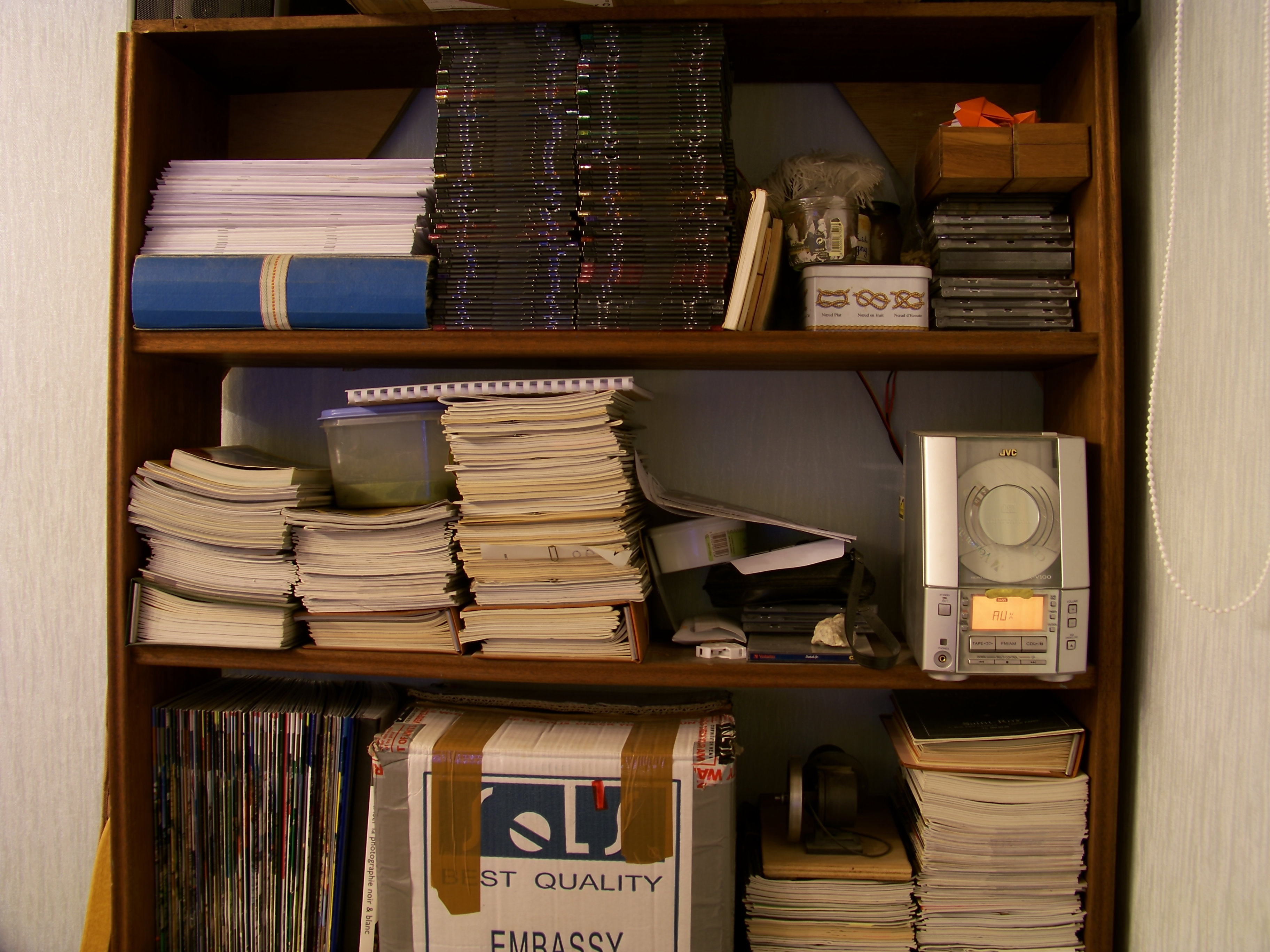
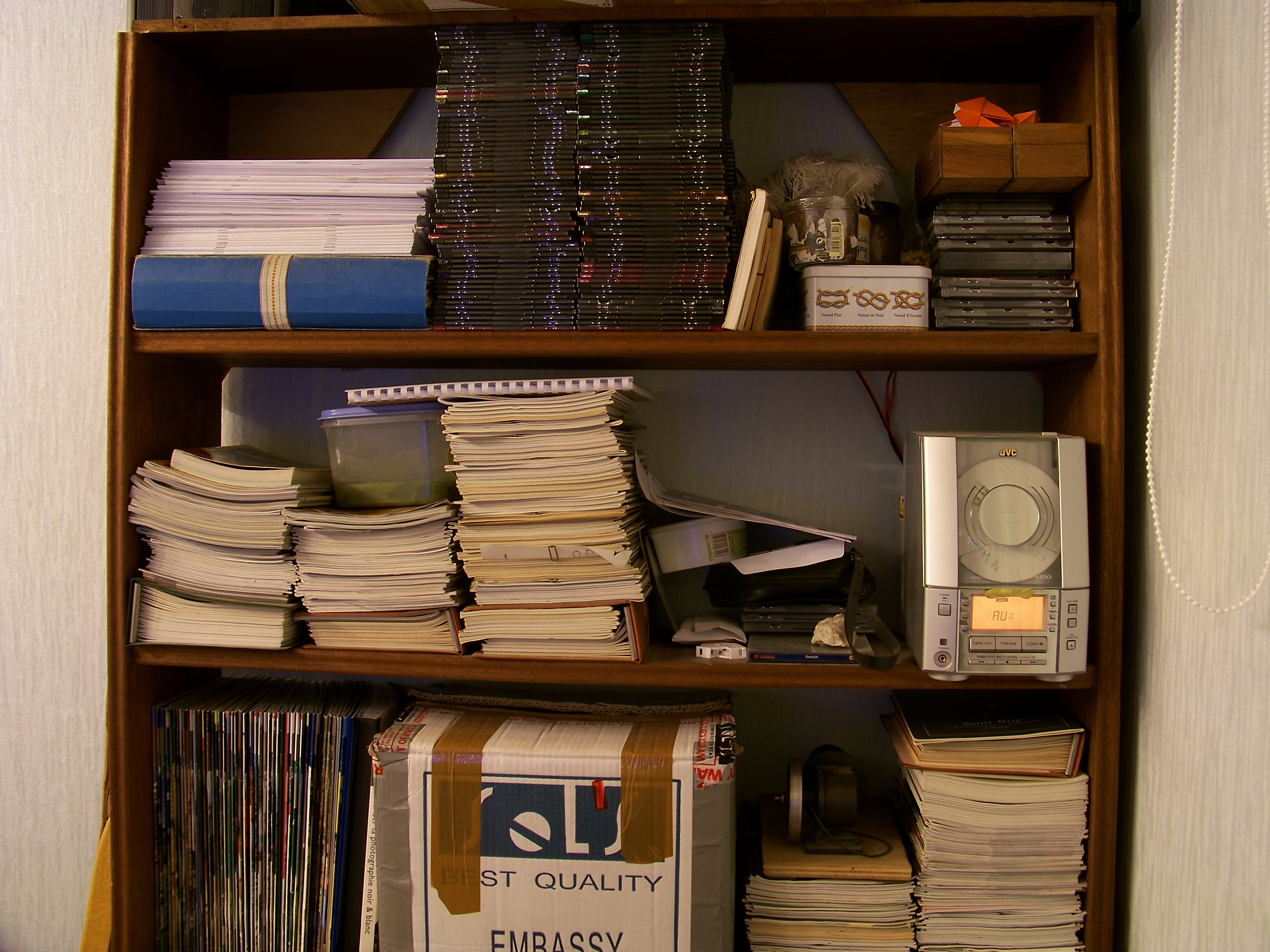
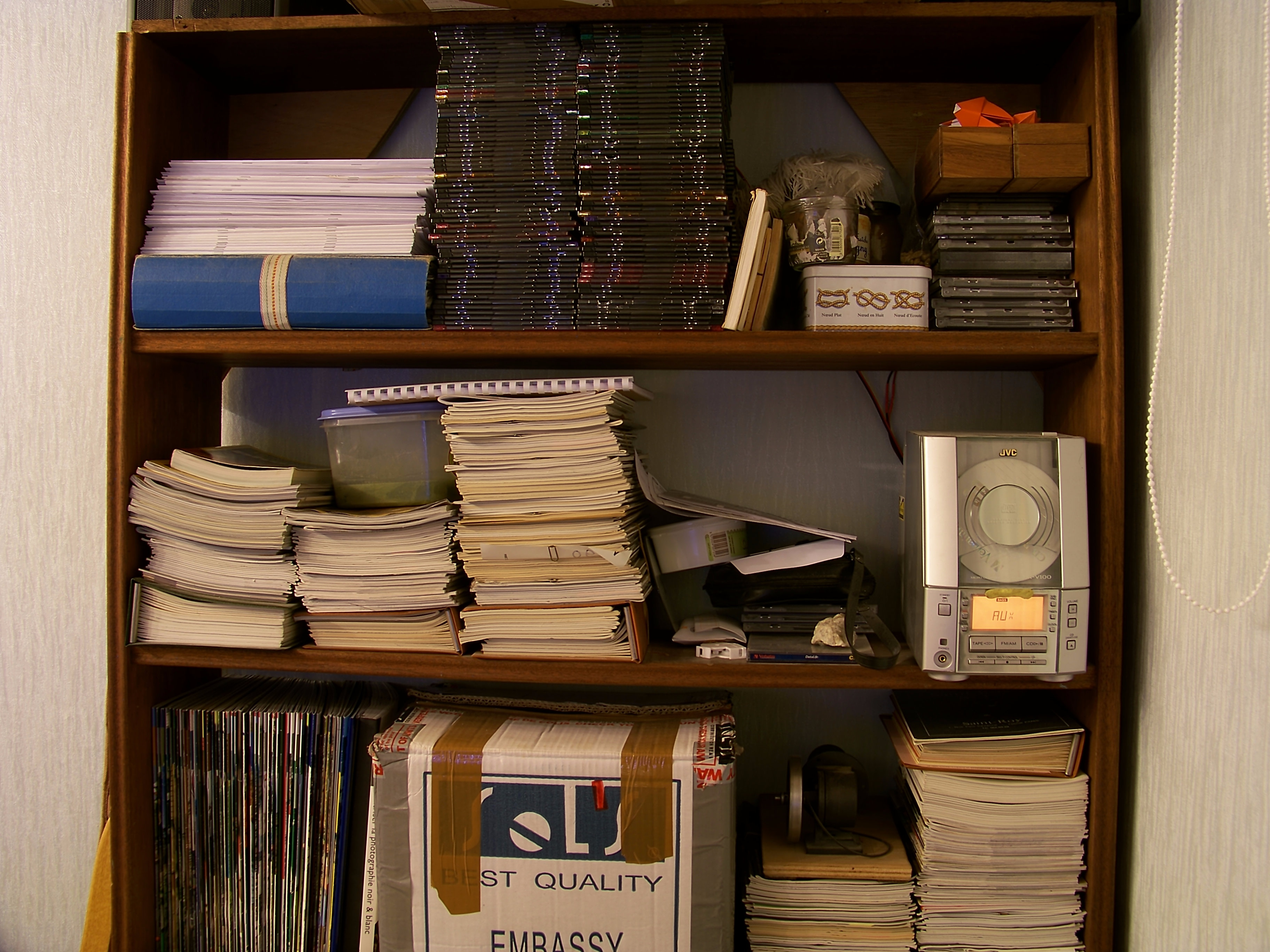
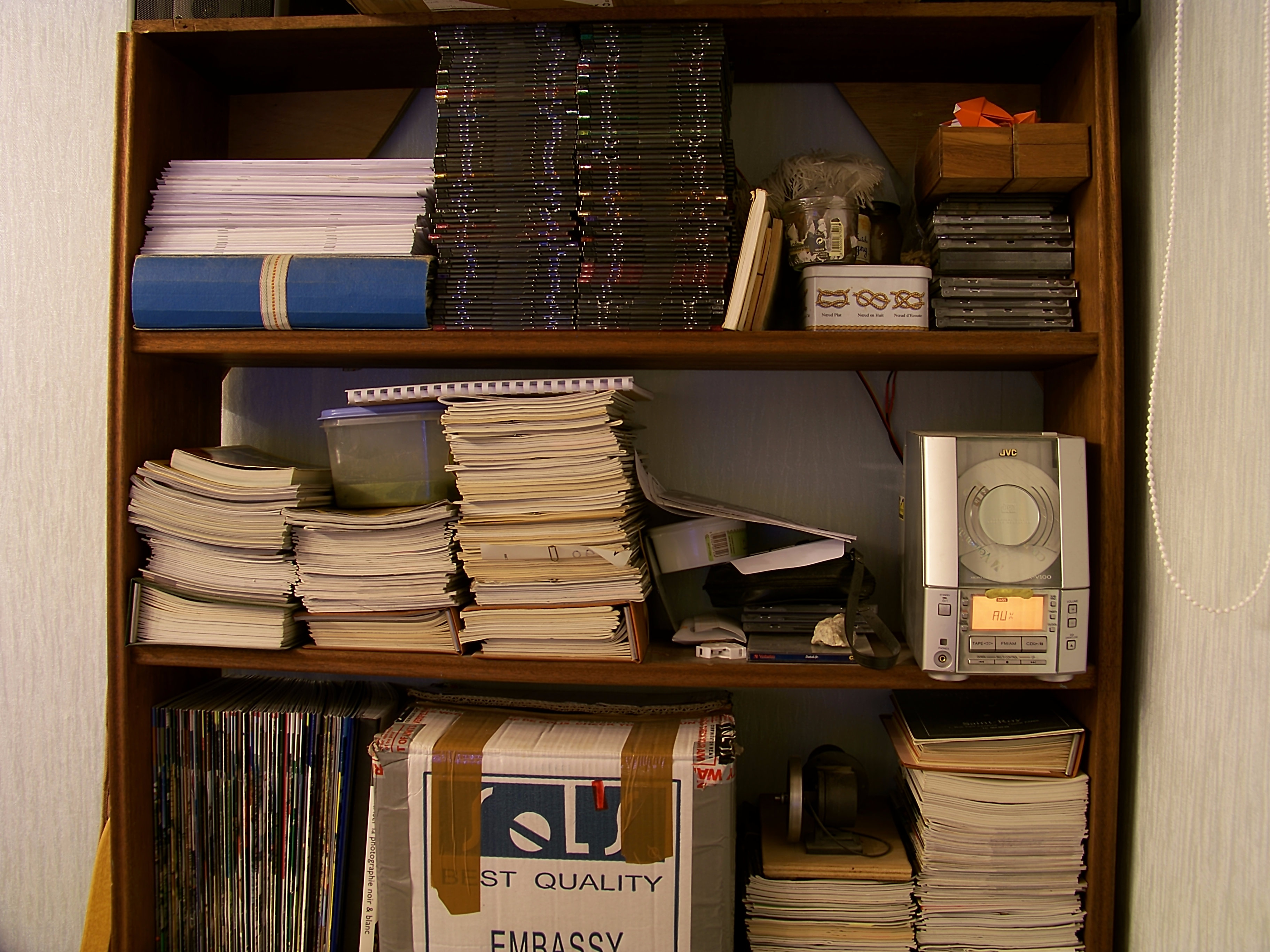
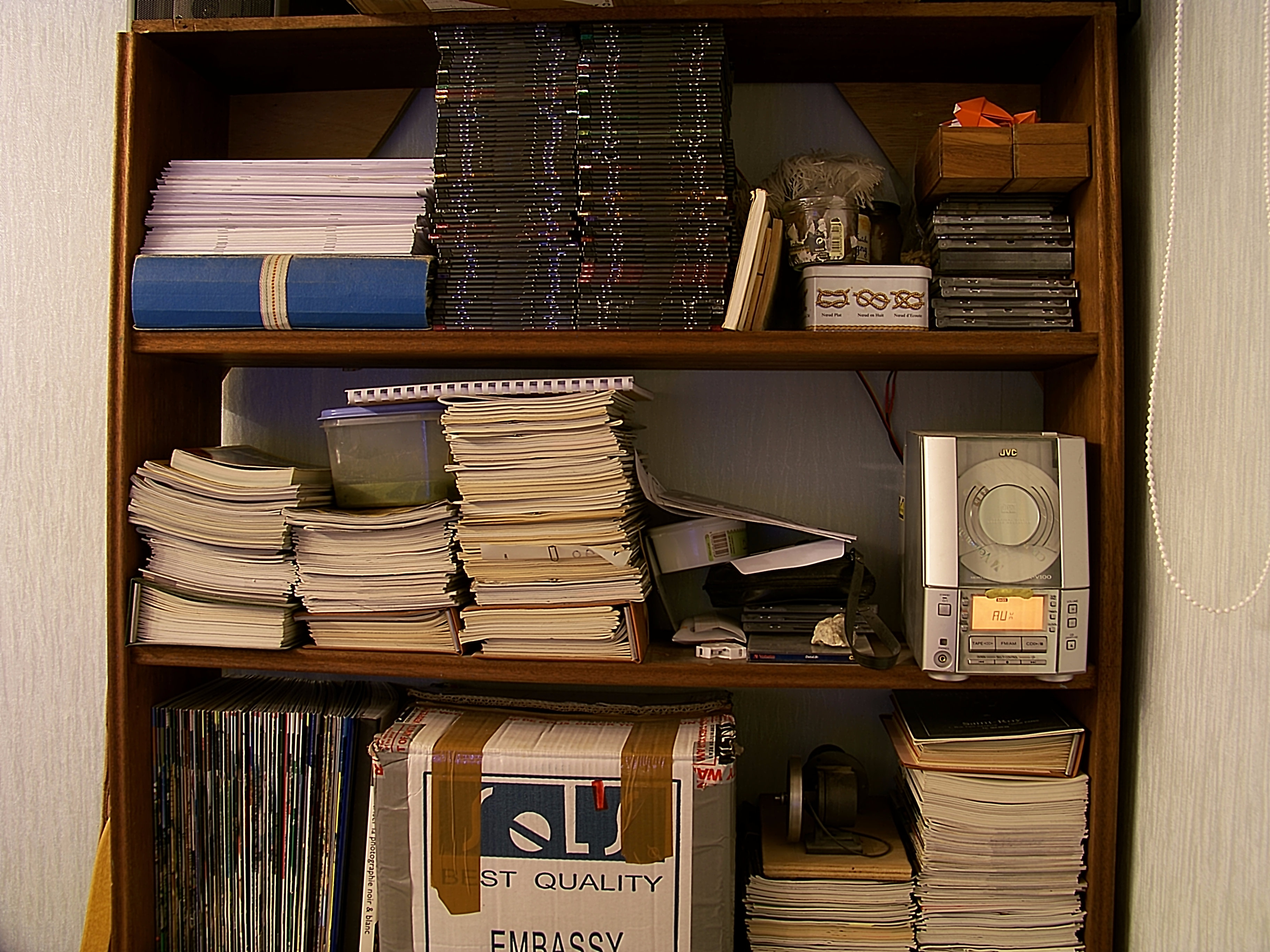
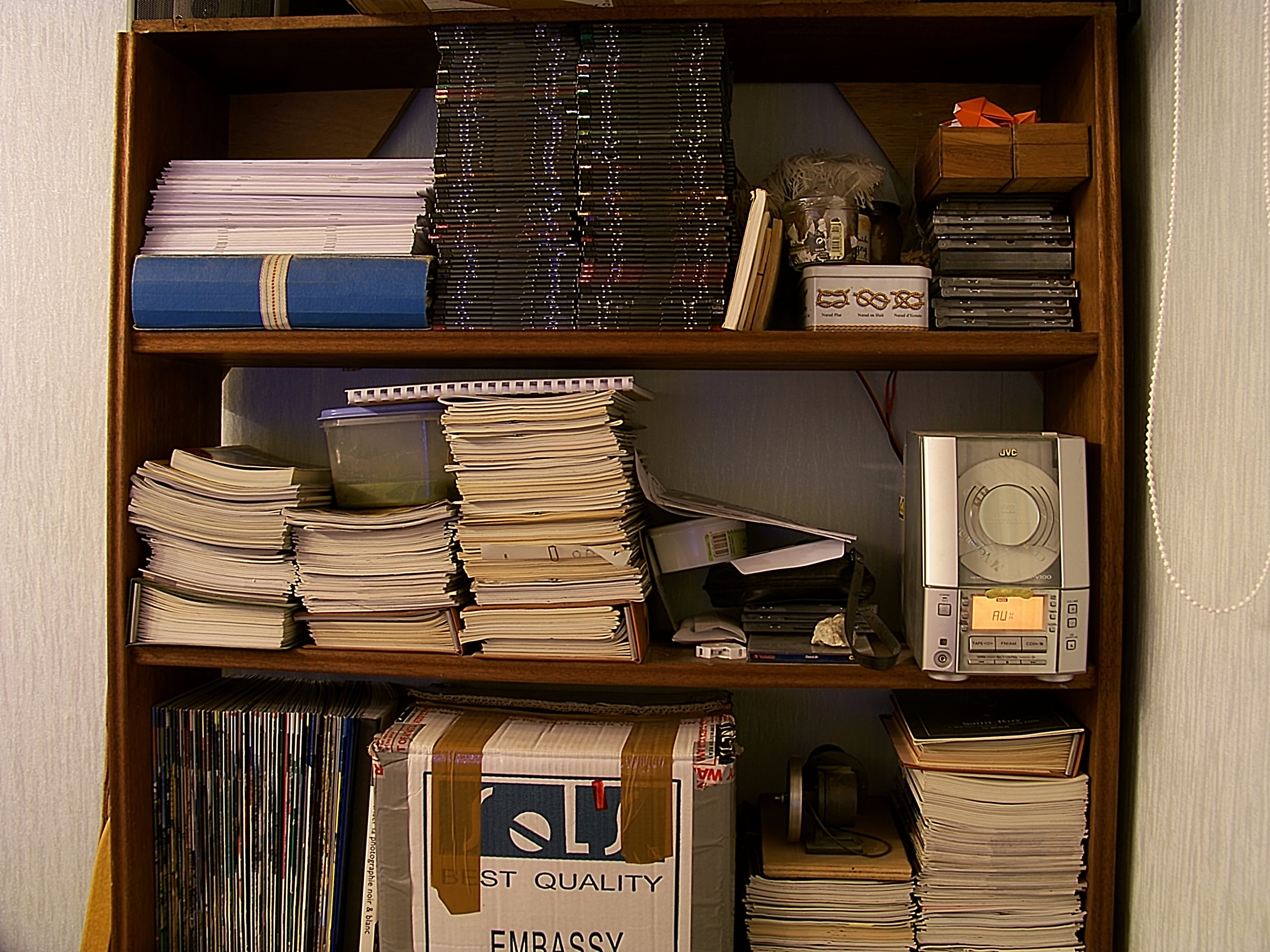
QuatriŤme essai Le coin de ma chambre correspondant au troisiŤme essai ťtait assez dťpourvu de dťtails (hautes frťquences spatiales) alors j'ai entrepris ce dernier essai dans le coin de ma bibliothŤque. Pour cette opťration j'ai rťalisť 20 images en couleurs, ma premiŤre ťtape fut de sťparer chaque couche. Ensuite j'ai fait canal par canal la moyenne 10 par 10 et puis la moyenne des moyennes. Une fois chaque canal calculť j'ai assemblť les trois canaux et je l'ai comparť ŗ une image prise au hasard dans la liste. L'ordre est repris du 3eme essai
Dťconvolution Comme maintenant on dispose d'une image sans bruit et d'une PSF on va essayer de la dťconvoluer ! Cependant le seul programme que je connaisse pour dťconvoluer une image est ImageAnalyser et il n'accepte que des types de floues prťdťfinis. Avec quelques essais j'ai essayť 5 valeurs d'ťtalement avec une matrice gaussienne, ce qui est le plus ressemblant sachant qu'il s'agit dťjŗ d'une moyenne d'image. Voici la premiŤre, Spread = 1,400
Voici la seconde, Spread = 1,900
Voici la TroisiŤme, Spread = 2,400
Voici la quatriŤme, Spread = 1,400
Voici la cinquiŤme, Spread = 1,400
En ce qui me concerne, celle qui est la plus nette est l'image nį1 avec un ťtalement de 1,4. Les autres ont un marquage ŗ chaque bord ce qui rend l'image faussement nette. Cette derniŤre manipulation est vraiment ŗ la limite des capacitťs de l'APN donc on va s'arrÍter lŗ dans le dťveloppement des capacitťs du kodak Easyshare Z1012IS. Conclusion Comme nous venons de le voir cet appareil photo numťrique est moyennement efficace ! MÍme si pour 99% des utilisateurs ŗ travers le monde il remplit son devoir sans problŤme pour moi il y a quelques points noirs. Pour commencer l'optique certes construite par Schneider mais qui ŗ un gros problŤme de distorsion, on peut mÍme ajouter un handicape. Le problŤme n'est pas la distorsion en elle-mÍme mais la diffťrence de distorsion entre les diffťrents canaux, ce qui fais une aberration chromatique insupportable. La rťsolution de l'objectif assez limitť, la tache focale est bien supťrieure ŗ la frťquence d'ťchantillonnage du capteur ce qui a pour principale consťquence de vendre du pixel qui ne sert jamais... Un autre problŤme liť ŗ cet appareil mais pas ŗ son CCD ni sont objectif est le temps de traitement aprŤs une prise de vue longue durťe, temps de traitement pouvant atteindre 20 secondes! (mais que fait le processeur de l'APN ???). Pour le dernier problŤme avant que je m'arrÍte c'est le flash de construction, plus rapprochť de l'objectif cela aurait ťtť mieux et pendant que je le dis un flash diamťtralement opposť cela aurait ťtť la class (le top pas la classe CSS!) Si vous Ítes comme moi dans les 1% restant, je vous conseil d'ťconomiser 6 500 Ä pour vous acheter un Mamiya ou un Hasselblad ťquipť d'un dos numťrique d'occasion ou d'Ítre trŤs bon informaticien pour pouvoir vous le construire! |