|
Introduction / construction : Avec le premier "set" stéréo j'ai vite atteint les limites qui étaient, je dois l’avouer, assez décevantes, cependant il y avait de l’idée et je m’en suis inspirer pour réaliser mon montage stéréo. Je suis parti d’une barrette de bois exotique de 2,8 * 2,5 cm ou j’ai fixé la distance entre les deux APN de 13cm (base stéréoscopique). La platine qui servira aux APN a été soigneusement poncé puis poli comme un miroir afin de garantir la planéité afin d’avoir une rotation nulle entre le cliché gauche et droit (parallaxe transversale constante en tout point de l’image). Ce défaut rend obligatoire le post-traitement des images et l’extraction de la rotation d’un des deux clichés, des deux en l’occurrence car Z-anaglyph ne travail qu’avec des fichiers qui on les mêmes nombre de pixel. Attention, utiliser des visses aux pas anglo-saxon d’un quart de pouce et les raboter pour pouvoir bloquer les APN. Voici les photos du dispositif :
Plan général du montage
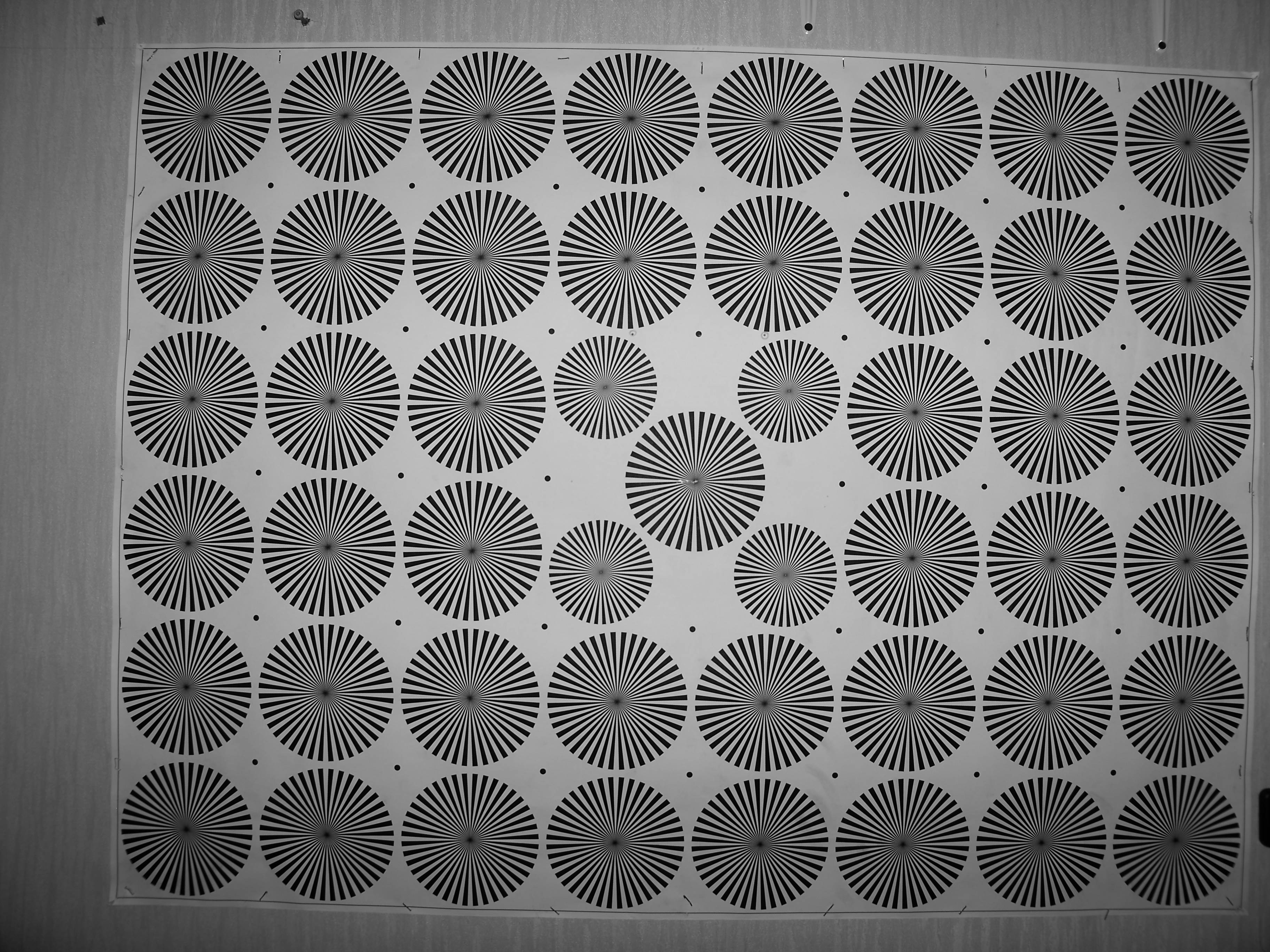
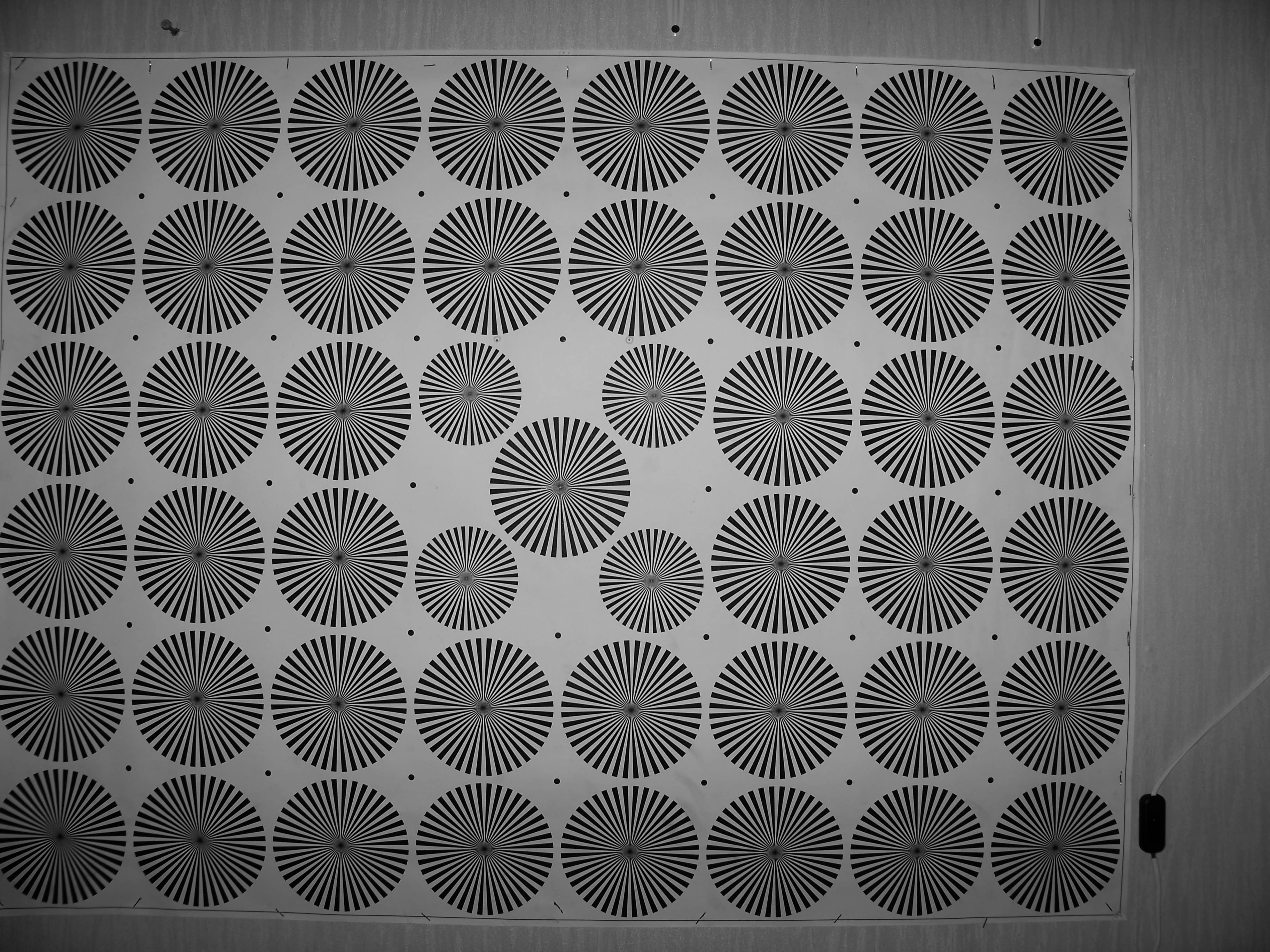
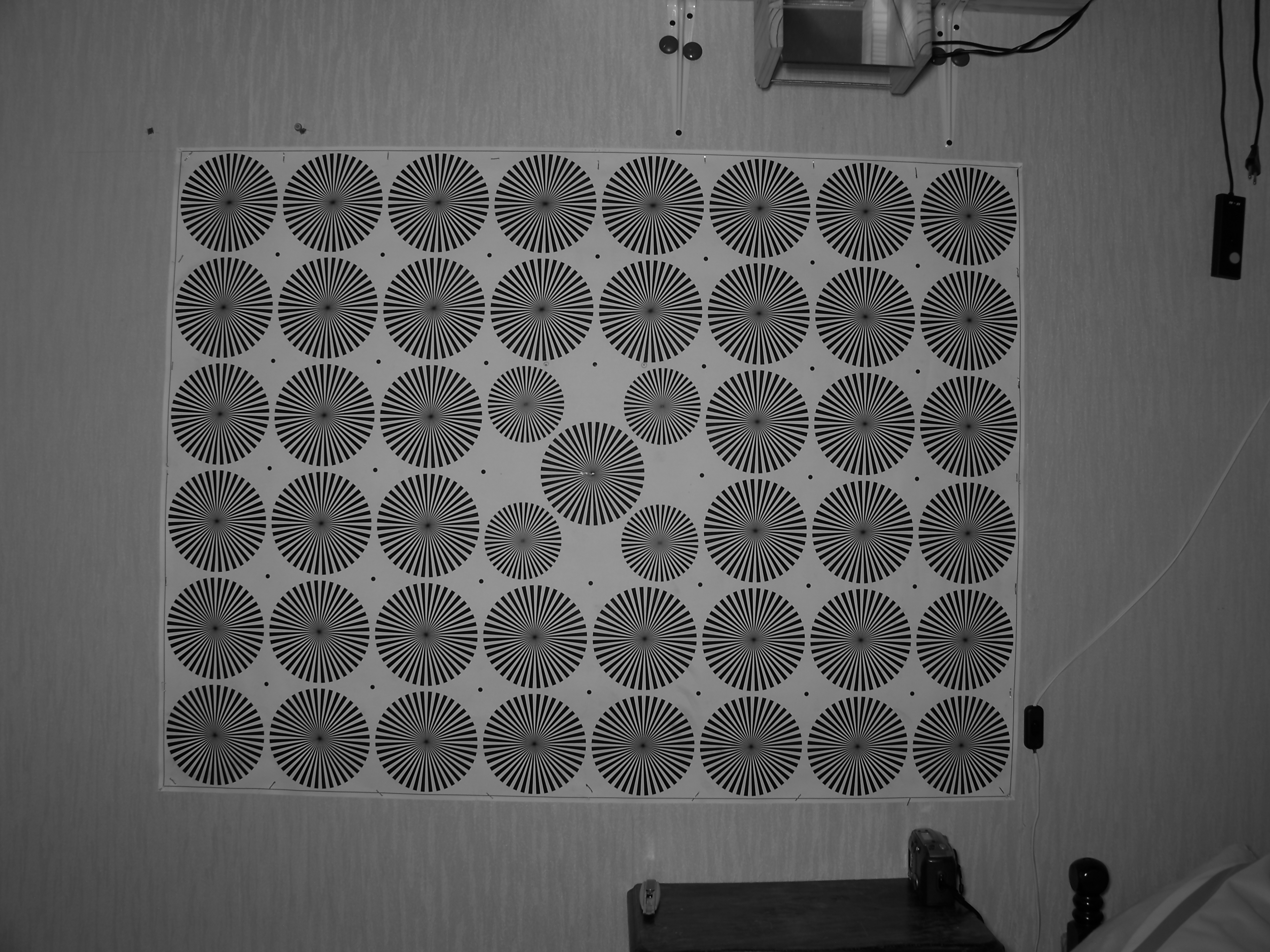
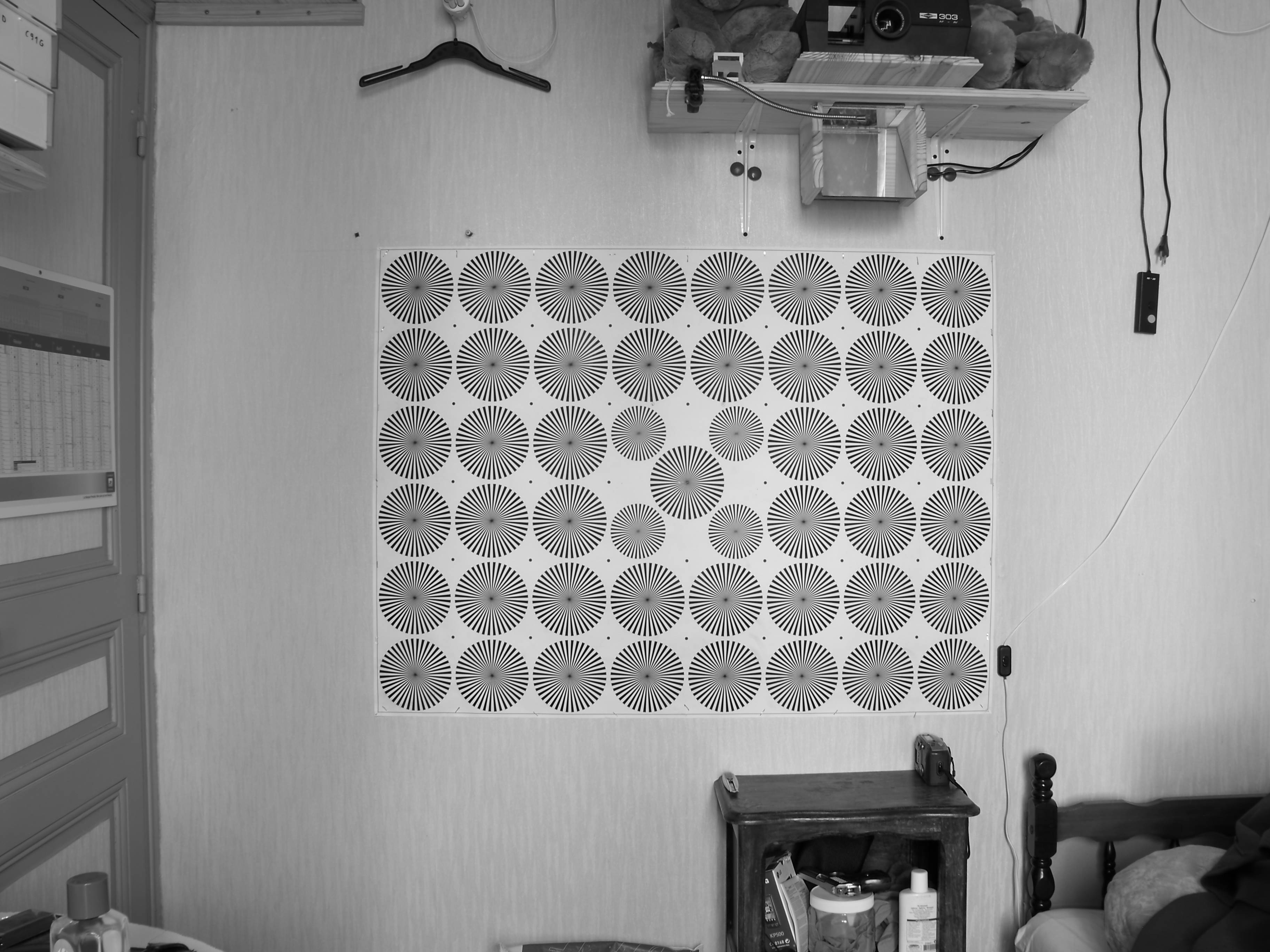
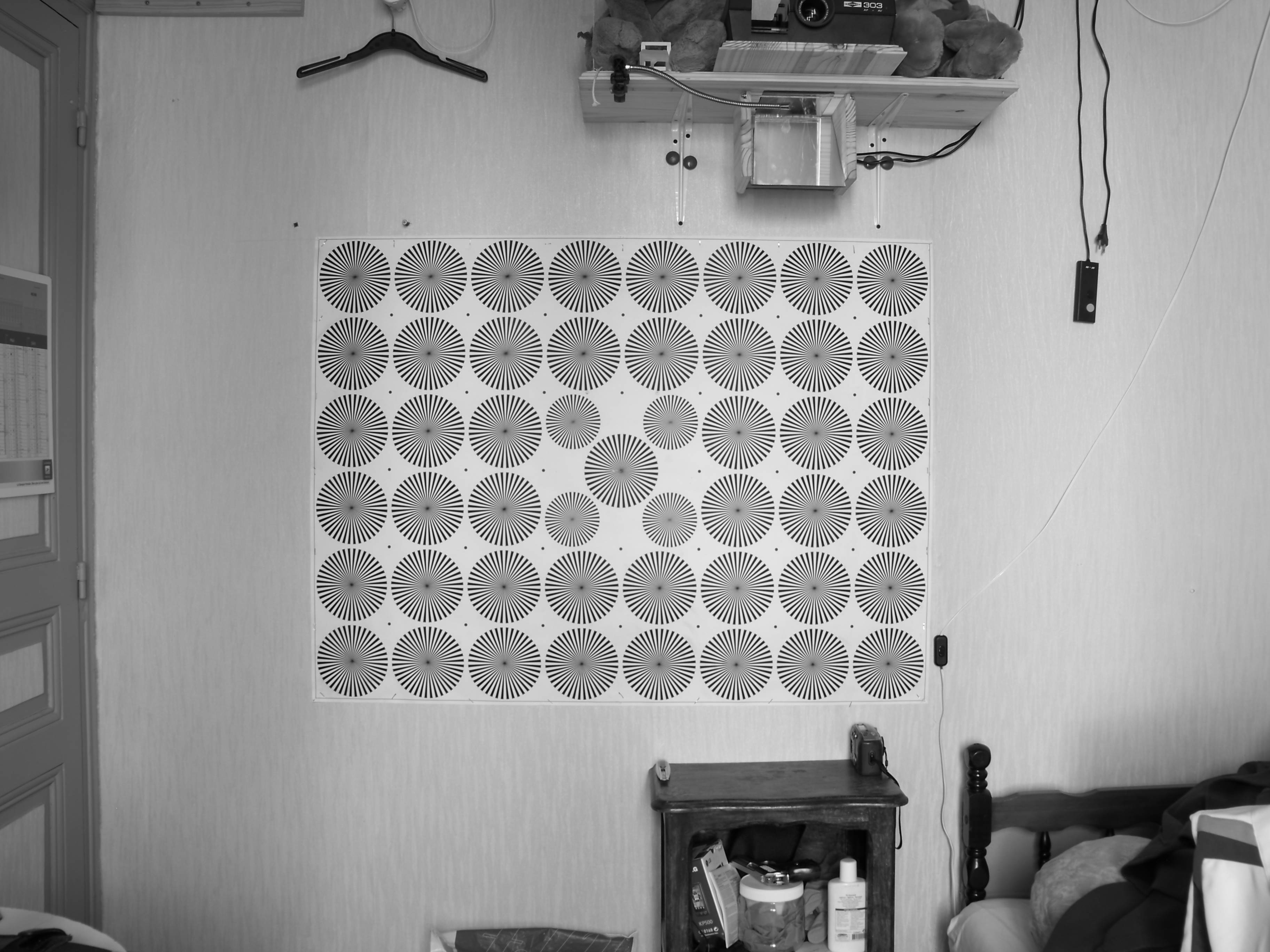
Le dispositif en batteries sur trépied Visserie et détails reflet sur le plan poli Calibration : Une fois l'instrument fabriqué, il ne reste plus qu'à installer les appareils, rendre leurs visées parallèles et mesurer l’angle entre les deux capteurs CCD (constante de la parallaxe transversale) puis vérifier la stabilité de cet angle par un redémarrage des APN. En effet l’optique étant mobile il est important de mesurer la variation de l’angle car les appareils sont souvent hors tension afin d’économiser les batteries. Pour cette partie j’ai eu recourt à mon poster d’étoile de siemens auquel j’ai rajouté deux points distants de 13cm au centre.
Détail du centre du poster L’intérêt de ce poster réside dans ces étoiles de Siemens à 40 périodes, durant mon TFE j’ai mis au point un programme qui calcule le centre d’une étoile de siemens au dixième de pixel. Ce code je l’ai implémenté dans un programme râteau qui comme son nom l’indique ratisse l’image à la recherche d’étoiles, à la fin de l’exécution il donne dans un fichier texte bien formaté les étoiles trouvées à ~5 pixels. Dans notre application ce petit programme va nous être bien utile car il va nous donner une paire de coordonnées clichées (vue gauche et vue droite), celles ci seront par la suite mises dans une matrice afin d’extraire avec fiabilité et rapidité l’angle entre les deux clichés. Comme une precision de 5 pixels est insuffisante il est absolument nécessaire de passer à un traitement "avancé" afin d'obliger le programme à calculer le cetre avec précision, le calcul des coéficiants étant le moins coûteux il sera donc privilégié. La première prise de vue à été réalisée en 7 poses successives afin de réduire au maximum le bruit dans l’image. Voici les deux vues qui en résultent, à gauche le cliché gauche et de même à droite.
caméra KCXHZ83400613 à gauche et KCXH784503865 à droite Dans les deux cas le programme touve bien les 49 étoiles, cependant les étoiles n'étant pas au mêmes coordonnées il en résulte qu'il à fallu les ré associer manuellement. Voici dans excel le résumé des données récoltées :
Les valeurs des écarts type sont essentiellement dues à la distorsion de l'objectif car en superposant les deux images les étoiles ne seraient pas superposées. Comme je n'ai pas envie d'établir un calcul matriciel je vais me contenter d'un simple calcul d'angle RVP (rectangulaire vers polaire) entre les deux points en gras. Suivant les indications du programme Anaglyphe de ma calculatrice je vous donne les résultats : Cliché gauche : rotation à gauche de 0,1506° Cliché droit : rotation à droite de 0,1506° Rotation équivalente à 10 pixels pour la totalité de l’image (moitié moins si la parallaxe stéréoscopique est annuler au centre de l’image). L’intérêt d’avoir pris des points diamétralement opposés permet de s’affranchir de la distorsion optique de l’objectif et par ce fait d’avoir un résultat moins sensible à cette autre problématique. Afin d’extraire ces résultats les APN ont été mis hors tension et démonter de la base stéréoscopique, cette manœuvre permettra par la suite de validé ou non la stabilité des rotations. Voici les deux vues :
caméra KCXHZ83400613 à gauche et KCXH784503865 à droite Et voici le tableau :
Les valeurs des écarts type sont plus faible car les écarts sont moins important en raison de la distance trépied / mire plus importante. Les résultats à ma calculette sont : Cliché gauche : rotation à gauche de 0,1367° Cliché droit : rotation à droite de 0,1367° Pour le moment on ne peut tirer aucune conclusion, cependant il semble qu'il y ai une tendance du'une dixaine de minute d'arc de rotation stabilisé autour de 0,145° avec une fuctuation de l'ordre du pixel en bord d'image avec une parallaxe nulle au centre Support ou CCD ? Maintenant que l'on à trouver l'angle entre les deux clichés il est important de lui imputer une origine, du support en bois (sensible aux conditions atmosphériques) ou du CCD (cartes et composants électronique ne sont jamais au même emplacement d’une pièce à l’autre). En inversant l’ordre des caméras (caméra gauche à droite et visse versa) on récupéra un angle identique si les caméras sont parfaites donc l’erreur sera imputée au support ou si la rotation s’effectue dans le sens inverse se sera les APN responsables. Donc sans plus attendre voici les images composites :
caméra KCXH784503865 à gauche et KCXHZ83400613 à droite Et voici le tableau :
Il en résulte les rotation suivantes : Cliché gauche : rotation à droite de 0,0725° Cliché droit : rotation à gauche de 0,0725° ce qui équivaut à un décalage de 4,5 pixels en bords d'image. Cette rotation équivalente à la moitié de l’autre en valeur absolue mais en sens inverse nous renseigne sur deux choses, le support est presque parfait et les CCD sont assez bien positionner. Voyons maintenant après une extinction, un déplacement des caméra, un passage au zoom max puis remise au zoom minimum si cette rotation est une constante, voici les composite des images :
caméra KCXH784503865 à gauche et KCXHZ83400613 à droite Et voici le tableau :
Comme on pouvait s’y attendre regrouper les étoiles au centre de l’image, lieu ou la distorsion reste raisonnable à permis de réduire de manière très significative les écarts type. Maintenant ce qui nous intéresse c’est l’angle entre les deux clichés. L’extraction se fait avec la même paire de point (en gras dans le tableau), voici donc sans attendre les valeurs obtenues : Cliché gauche : rotation à droite de 0,0698 Cliché droit : rotation à gauche de 0,0698 donc c'est évident 0,0725 puis 0,0698 recoupes les deux premiers résultats obtenus. L'écart obtenu dans le premier cas était de 0,0139° soit 50" d'arc ici il est de 0,0270° équivalant à 95" d'arc. Ces écarts donneraient au maximum 2 pixels de décalage au bord des images, bien inférieur à la distorsion qui frôle les 70 pixels que j’avais mesuré en 2008 lors de l’acquisition de mon premier APN. Conclusion de calibration : Je tiens à souligner ici que le premier album stéréoscopique réalisé avec ce dispositif est le : Stereophotographie Oleronaise et que je n’ai réalisé aucun traitement ni calibration ni rotation par mesure unitaire. Avec ces petites rotations le cerveau arrive quand même à restituer la 3D mais avec difficulté sur les bords. Le second pour l’album Le Mans Stereo Phase II où chaque couple à été manuellement calculée et repositionner la 3D est beaucoup plus fluide, plus accessible même dans les bords ! Donc tout cela pour dire qu’il y a trois façons de faire, la première on ne fait rien et on s’en remet à la chance, la seconde on calcule les rotations pour chaque couple et la dernière : on calibre et on applique une correction à la chaîne. Comme conclusion sur ce chapitre de la calibration stéréoscopique on peut dire que du moment où l’on ne touche pas aux caméras (démontages, chutes…) il n’y a aucune raisons de croire que les paramètres de calibration on changer de manière significative. Donc si on à la possibilité de calibré c’est bien mais pas obligatoirement nécessaire. Chaîne de traitement : Une fois le couple stéréophotographique acquis, il ne reste plus qu’à le traiter convenablement. Schématiquement j’ai réalisé une chaîne de traitement qui permet d’optimiser la vision stéréoscopique sans détruire totalement l’information colorimétrique. Dans les explications on partira d’image gauche et droite ayant déjà subi les rotations. Comme la lecture des anaglyphes se fait avec des filtres bleu et rouge l’information stéréoscopique pertinente est soit bleu soit rouge une image saturée en couleur nuie énormément à l’interprétation de l’information de profondeur, c’est pour cela que je préfère diminuer la saturation des images de 20%. L’image stéréoscopique ainsi nettoyée peut être assemblée et sauvegarder avec une grande pertinence sur l’information de profondeur. Je tiens à rappeler ici de la moyenne des Dx et Dy n’étant pas nulle il est nécessaire d’appliquer une correction de Dy afin d’éliminer complètement la parallaxe transversale et d’ajuster le Dx afin d’avoir des éléments devant la surface de l’écran et d’autres dernières. A cette étape nous disposons donc de 3 fichiers originaux (image de gauche, de droite et en 3D) les images dé-saturées elles peuvent êtres mises à la corbeille, attention à ne pas les supprimer car elles seront nécessaires si on désire reconstruire un ou plusieurs anaglyphes. Voici en image ce que cela donne :
Images Originales avec rotation de 0,125°
Images désaturées
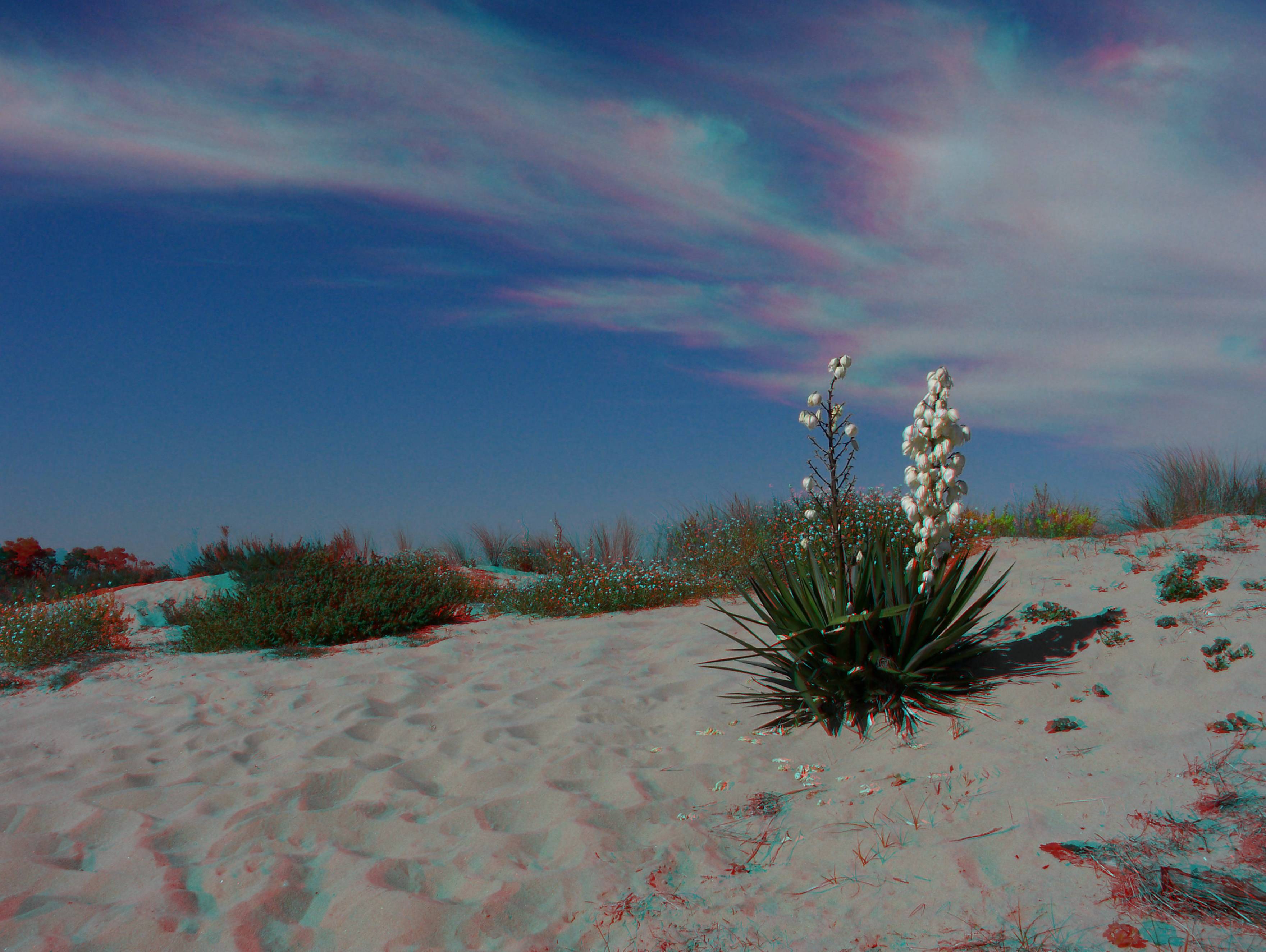
Images stéréoscopique en anaglyphe mise en page : Une fois que l’on a les images il est indispensable de savoir quoi en faire, c’est pour cela que j’ai créé un organe de publication pour les anaglyphes. Afin de pouvoir intégrer cette technologie dans l’architecture de mon site web j’ai conçu un cahier des charges et réaliser une extension aux deux pages php. C’est deux pages sont, l’une l’index qui présente les miniatures nécessaires avec les liens pour accéder à la seconde qui présente l’image en grand format avec la possibilité de télécharger l’original et de naviguer dans les images. Le mode 3D étant fixé par une base de données l’affichage des miniatures en 2D (cliché gauche) se fait en passant un paramètre php dans la barre d’adresse. Afin que tous les internautes puisse voir la totalité à l’écran la largeur ne devait pas dépasser les 1000 pixels, ce qui est plus économe en bande passante également. Étant donné que les anaglyphes sont quasiment dépouillés de l’information colorimétrique j’ai souhaité mettre à la disposition les images originales en couleur. Le choix c’est vite imposé car le format du cahier des charges ne permet pas le gaspillage de pixels écran. Comme pour le Leica SD2000 le choix c’est imposé par lui-même cliché gauche au-dessus et cliché droit en dessous ! Pour compléter la page un bandeau au-dessus qui permet d’accéder directement aux douze couples stéréoscopiques (six avant et six après) afin de dynamiser la navigation et un contrôle en bas de page pour la forme (couple stéréo précédent / suivant, retour). Le mode de visualisation en technologie bananière VI est totalement opérationnel, c’est à dire que l’on peut changer la couleur de fond ajouter les informations exif du cliché gauche uniquement (en toute logique pareil que pour le cliché droit à quelques millisecondes). Ce qui change c’est les liens vers les images, en cliquant dessus on ne retourne pas à la planche contact on télécharge le fichier source, le retour se fait uniquement sur le lien retour.
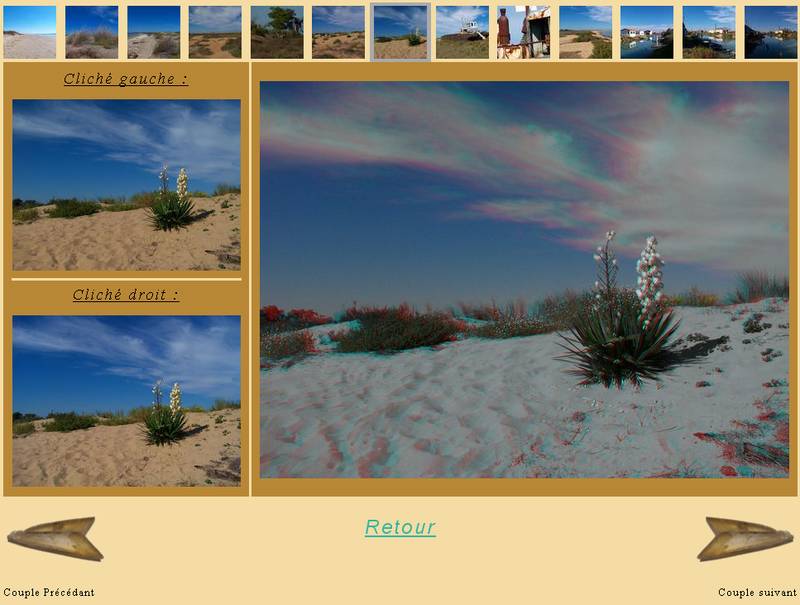
Voici shématiquement ce que cela donne
Et ce que cela donne avec l'exemple Conclusion : Même si il reste quelques optimisations dans les calculs on peut déjà dire que la calibration stéréoscopique est maîtrisée à ce stade. Également le traitement d’image afin d’extraire pour chaque couple : - 2 miniatures en 177*133 (l’une 3D et l’autre du cliché gauche) - 2 images larges en 276*207 en préservant l’information exif originale - 1 image originale en 3D de rapport 1,33333 - 1 image 3D de taille 640*480 - 1 image de rapport 1 (le plus grand carré centré contenu dans l’image) de taille 64*64 À ce stade il ne reste plus qu’a peaufiner le déclenchement synchroniser des caméras et à trouver de bon sujet à photographier mais pour le reste c’est dans la boite. |